Introduction
- 1. The desktop beamline
- 2. General Remarks About Program mar345dtb
- 3. General Remarks About Program mardtb
- 4. Computer Requirements
1. The desktop beamlineTM
1.1 Overview
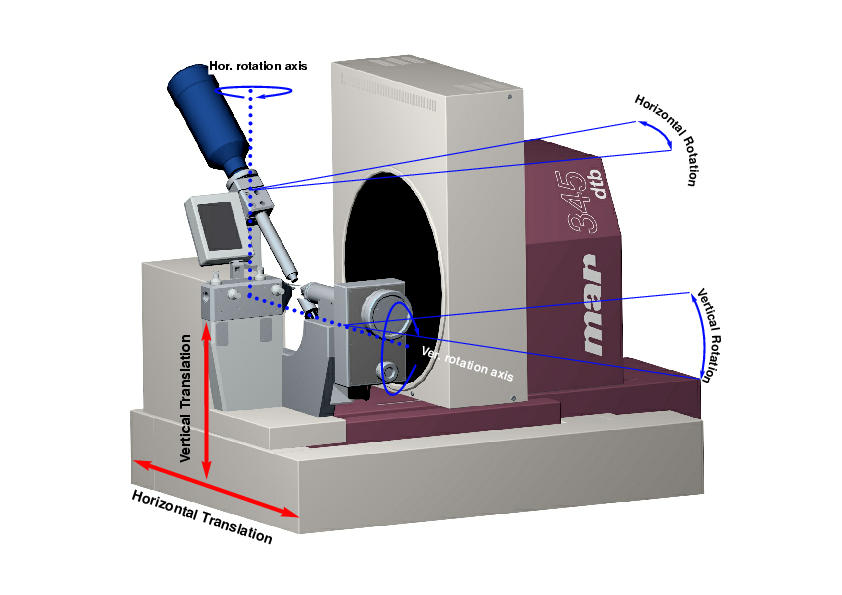
The desktop beamline (dtb) is a highly sophisticated goniometer system. Almost all movements are motorized and can be controlled by a host computer. This allows for a detector system mounted onto the dtb to be aligned with the beam without user intervention. The dtb is capable of finding the beam and refining the optimal position thus yielding the best possible primary X-ray beam intensity. In addition, a beam profile can be obtained and slit apertures can be determined automatically to fit the monochromators properties.
Table 1: dtb hardware components
| Component | Features |
|---|---|
| Goniometer | - High precision PHI-axis - Motorized crystal rotation (PHI) - Motorized crystal translation along spindle (z-axis) - Optional crystal x/y-translations for automatic alignment - Optional PHI-swing for mounting cooled crystals |
| Collimator | - 2 pairs of hor. and ver. slits followed by ionization chambers - Rotary beam shutter - CCD-microscope with viewing direction along X-ray beam - Motorized beamstop |
| Cardanic cradle | - Positional alignment motors: hor. and ver. translations of entire instrument - Directional alignment motors: hor. and ver. rotations of detector mount coupled to collimator |
| Detector mount | - Vertical 2-theta arm - Crystal-to-detector translation stage |
| Others | - Optional motorized cryo-head translation - Optional automatic cryogenic sample changer ("csc") - Optional single sample changer ("ceasymount") |
1.2 Motors
The dtb features an expandable number of high precision stepper motors. Most of the motors are driven by a dedicated motor stepper control module which is an autonomous piece of hardware with its own microprocessor (CPU). The motor modules are coupled to a high speed industrial serial bus (CAN-bus). Each module receives commands and sends status information to the CAN-bus. On the CAN-bus, each member is identified by a unique number or "id" in a similar way as computers in a network. The numbers are arbitrary but must be unique. Note, that the main dtb controller manages the motors for the PHI-axis, the beamstop and the 2 pairs of slits of the collimator. Those motors don't have their own stepper modules.
The main dtb controller is a minicomputer that works as interface between the host computer and the motor modules on the CAN-bus. It features an Ethernet interface to the host-computer and translates commands from the outside world into appropriate signals for the CAN-bus and viceversa. The controller is driven by a real-time operating system and implements the usual TCP/IP-services, i.e. ping, telnet, and ftp. Program mar(345)dtb communicates with the controller using standard Unix sockets on dedicated ports. In program mar(345)dtb the motors are usually referenced by certain abbreviations.
Table 2: dtb motors and their names within program mar(345)dtb
| Name | CAN-id | Description |
|---|---|---|
| SLIT_1_VER | 1 | Vertical slit in front of 1. ionization chamber |
| SLIT_1_HOR | 2 | Horizontal slit in front of 1. ionization chamber |
| SLIT_2_VER | 3 | Vertical slit in front of 2. ionization chamber |
| SLIT_2_HOR | 4 | Horizontal slit in front of 2. ionization chamber |
| BEAMSTOP | 5 | Translation of beamstop along beam |
| PHI | 6 | Phi-axis |
| THETA | 11 | 2-theta arm |
| DISTANCE | 12 | Translation of detector along beam |
| TRANS_VER | 13 | Vertical translation of dtb (up/down) |
| ROT_VER | 14 | Vertical rotation of dtb (up/down). Center of rotation is inbetween 1. and 2. ionization chamber. |
| TRANS_HOR | 15 | Horizontal translation of dtb (left/right). |
| ROT_HOR | 16 | Horizontal rotation of dtb (left/right). Center of rotation is inbetween 1. and 2. ionization chamber. |
| XTAL_Z | 17 | Translates crystal along PHI axis |
| CHI | 18 | Optional Phi-swing: rotation of Phi-axis up to + 90 deg. |
| SERVER | 19 | Sample changer & easymount only: mounts sample on goniometer head |
| ROTOR | 20 | Sample changer & easymount only: brings sample from carousel close to goniometer |
| LIFTER | 21 | Sample changer only: lifts sample out of carousel |
| PICKER | 22 | Sample changer only: picks a sample in carousel |
| CAROUSEL | 23 | Sample changer only: turns carousel |
| ACTUATOR | 24 | Optional: translation for cryo-head |
| XTAL_X | 26 | Optional: x-translation of crystal on goniometer head |
| XTAL_Y | 27 | Optional: y-translation of crystal on goniometer head |
| XPS_X | 26 | Optional: x-translation of crystal plate scanner (XPS) |
| XTAL_Y | 27 | Optional: y-translation of crystal plate scanner (XPS) |
1.3 Principles of Operation
The geometrical setup of the desktop beamline is such that a beam passing through the collimator will hit a sample mounted on the goniometer. The cross-hair of a CCD-microscope is centered at the intersection of the primary beam with the sample mounted on the PHI-axis. On the detector translation stage an area detector (CCD, Image Plate) is mounted such that at 2-theta=0 the center of the area detector corresponds to the center of diffraction of the sample.
During the "alignment" procedure the desktop beamline drives into a position where the primary X-ray beam passes through the collimation system. To achieve this, 2 motors are required that translate the entire instrument along the beam and 2 motors that rotate the collimator and a frame with the goniometer and detector translation around the beam. The horizontal and vertical axes of rotation are centered at some point close to the first ionization chamber. Within the program the 4 motors are called:
- TRANS_VER: motor for translating the instrument in the vertical direction
- TRANS_HOR: motor for translating the instrument in the horizontal direction
- ROT_VER: motor for rotating the instrument in a vertical plane
- ROT_HOR: motor for rotating the instrument in a horizontal plane
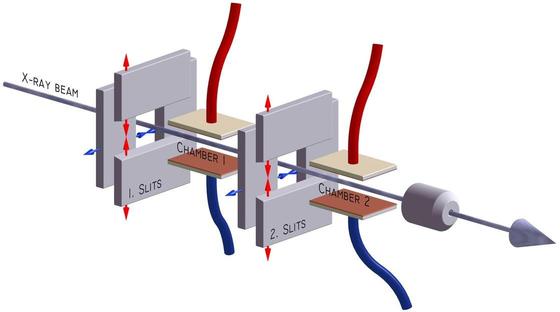
In order to understand how the alignment works it helps to have a look at the design of the collimator. It consists of 2 pairs of continuously variable slits followed by an ionization chamber each. The ionization chambers detect the intensity of the primary X-ray beam coming through the slits. The readings of the ionization chamber within the collimator are obtained by constantly digitizing currents as produced by the X-ray beam. For this purpose, each ionization chamber is coupled to a 16-bit ADC with extremely high sensitivity. The range of operation is from weak sealed-tube sources to 3rd generation synchrotron sources. As is usual for ADC's, there is an offset that marks a baseline of the ADC. This offset is adjustable and must be set such that without X-ray beam the readings don't drop to 0. The stability of the ADC readings depends on temperature and humidity, so varying ambiental conditions will have some influence on the readings. See below for more details about how to adjust the ADC offsets.
The alignment procedure usually consists of the following steps:
- Find beam in the first ionization chamber:
The horizontal and vertical translation motors must be moved until the primary X-ray beam passes through the first pair of slits. For this purpose it is helpful to widely open up both slits. - Find beam in the second ionization chamber:
Once the beam passes through the first chamber, the horizontal and vertical rotation motors must be moved until the primary X-ray beam also passes through the second pair of slits. For this procedure, the first pair of slits can be closed down to < 1.0 mm, but the second pairs of slits again must be opened up. Usually, when aligning the dtb from scratch the beam does not go through the second pair of slits right away. Due to an inclination or tilt it is more likely that it hits the second pair of slits and gets swallowed before reaching the second ionization chamber. By driving the rotation motors the intensity readings in the first ionization chambers don't vary too much, since - in first approximation - the rotations are not coupled to the translations. In practice, you will observe some variations, though. - Optimize beam in the first ionization chamber:
At this stage, you should have some positive readings in both chambers, and it is assumed that only some fine tuning is required. Due to the weight of the detectors the statics of the entire instrument varies when driving the detector translation (DISTANCE) or 2-theta stage. Due to the sensitivity of the ionization chambers you will observe a decrease of the readings of up to 20%. In other words: reoptimizing the beam in both chambers is strongly recommended when moving those motors.
For the optimization the first pair of slits are closed down to the approximate beam size, usually around 0.6 mm for Osmic mirrors. The instrument then determines the maximum of the readings when driving across the beam in the horizontal and vertical plane. - Optimize beam in the second ionization chamber:
Both pair of slits are closed down, typically to 0.3 mm aperture. Again, the instrument determines the maximum of the readings when driving across the beam in the horizontal and vertical plane.
1.4 Remote Control
The remote control unit comes in 3 flavours:- "S": small standard version
- "M": extended version for use with automatic goniometer
- "XL": extra large version for use with automatic sample changer
1.4.1 "S"-Version
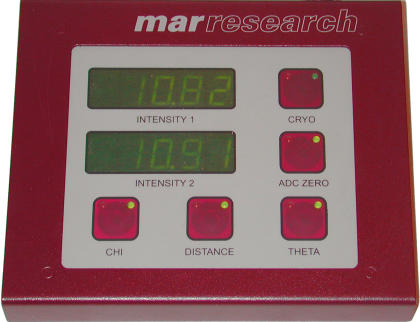
The remote control unit features 5 buttons with multiple functionality. The buttons are called "CRYO, BEAMSTOP, THETA, DISTANCE, CHI". For all buttons, 3 states are possible and marked by an LED positioned under the button:
- Green LED: task is idle and ready to go
- Red LED: task is active and may be aborted
- No LED: task is NOT available
The buttons work the following way:
- When pressed while the task is active (red LED), the task will be aborted.
- When pressed while the task is idle, the corresponding motor
drives to position 2 if it is sitting at position 1.
Otherwise, if the motor is not sitting at position 1, the
motor will drive to position 1.
For DISTANCE the typical situation is that the detector sits close to the crystal and you want to drive it out of the way for crystal mounting. Afterwards, you want to drive the detector back to where it was. For this purpose, position 1 should be handled dynamically and position 2 should be set far away from the crystal, e.g. to 400 mm. I.e. when operating the distance via the remote control will move to 400 mm when pushing the DISTANCE button once or otherwise move back to its original position.
For THETA, position 1 should be at 0.0 degrees. An alternate position should be set to a relatively small value in order to avoid collisions, e.g. 5 degrees. I.e. the dtb is allowed to move in the range 0 and 5 degrees via the remote control.
For CHI, position 1 should be at 0.0 degrees. Position 2 should be set to a comfortable position where to mount a crystal. It is NOT suggested to set it to 90 degrees since here the CHI arm may collide with the cryo cooler. It is safer to stay below 80 degrees!
The CRYO button originally did not have any function, and on some dtbs without a cryo actuator this button has been reassigned to drive the BEAMSTOP motor. For instruments delivered before 2004, the BEAMSTOP button has been called ADC ZERO and was used to reset the ADC offsets of both ionization chambers. This functionality has been eliminated in firmware version ≥ 4.0. From version 4.0 on, the "ADC ZERO" button will only operate the beamstop. On instruments with an optional illumination unit, the "BEAMSTOP" button will also operate the paddle and the LED of that illumination unit.
It is possible to reassign buttons of the remote control to take other functions. For more details about how to reassign buttons, to do so, please refer to chapter "Input: Keywords for dtb" and to chapter "Appendix: How to Assign Motors to the Buttons of the Local Motor Control" .
1.4.2 "M"-Version
The extended version of the remote control unit allows for operation of the motors used with the optional automatic PHI axis. In this setup, the dtb is extended by motors for the x- and y-movements of the goniometer head. The remote control unit allows to drive x,y- and z-translations of the goniometer head as well as the PHI axis.Table 3: Additional buttons on the "M"-version of the remote control unit
| Button | Function |
|---|---|
| X+ | Moves crystal to the right if PHI=90 deg. Moves crystal to the left if PHI=270 deg. Moves crystal up if PHI=0 deg. Moves crystal down if PHI=180 deg. |
| X- | Opposite to X+ |
| Y+ | Moves crystal to the right if PHI=0 deg. Moves crystal to the left if PHI=180 deg. Moves crystal up if PHI=90 deg. Moves crystal down if PHI=270 deg. |
| Y- | Opposite to Y+ |
| Z+ | Moves crystal away from PHI-handle |
| Z- | Moves crystal towards PHI-handle |
| PHI-X | Moves PHI to either 90 or 270 deg., i.e. a position where an x-translation moves the crystal either left or right. |
| PHI-Y | Moves PHI to either 0 or 180 deg., i.e. a position where an y-translation moves the crystal either left or right. |
| Magnet | Activates or deactivates the holding magnet on the goniometer head. |
1.4.3 "XL"-Version

The extended version of the remote control unit allows for operation of the motors used with the optional automatic sample changer. In this setup, the dtb is extended by motors for the x- and y-movements of the goniometer head and by those to take sample out of the carousel of the sample changer. In addition to the buttons in the "M"-version of the remote control unit, you will find:
Table 4: Additional buttons on the "XL"-version of the remote control unit
| Button | Function |
|---|---|
| CAR- | Decreases the current carousel position by 1 unit |
| CAR+ | Increases the current carousel position by 1 unit |
| INIT | Initializes all sample changer motors including x,y,z-translations of goniometer head |
| INIT CAR | Initializes the CAROUSEL and LIFTER. |
| UNLOAD | Unmounts the sample that is currently mounted on the goniometer head to the selected carousel position. Also used for mounting. |
| GIVE/TAKE | GIVE: the vial in the selected carousel
position is taken out of the carousel and presented to the user. TAKE: a vial is moved from the presentation position into the carousel position where the GIVE operation has started. |
2. General Remarks About Program mar(345)dtb
mar345dtb is a highly integrated graphical user interface for collecting data with the mar345 detector mounted on the desktop beamline. The program is fully menu driven and features options for setting up one or more data collection runs. It allows for fully automatic alignment of the instrument with the beam. It also features an area for image display and analysis.
The program is provided as binary executable for Linux. Due to decreasing importance of SGI IRIX and Compaq Tru Unix, support for those architectures is discontinued. The program may run also on Mac OSX, but the TV stream from the crystal cannot be displayed onto the screen from within the application. Hence, usage of the program on OSX is not recommended.
Table 5: Supported architectures and operating system versions
| Architecture | Operating system |
|---|---|
| Linux PC | Ubuntu ≥ 12.04, Debian ≥ 8.x, RHEL/CentOS ≥ 5.x, |
3. General Remarks About Program mardtb
Program mardtb is a derivative of program mar345dtb. As far as the goniometer is concerned, it provides the same functionality as program mar345dtb and hence, the documentation for that program version is fully valid for program mardtb. The fundamental difference is that program mardtb directly interfaces to the hybrid photon counting detectors of the PILATUS3 and EIGER series manufactured by DECTRIS instead of the mar345 image plate detector. Due to their extremely short read-out time the typical way of data collection with the DECTRIS detectors is the so called "shutterless" operation. Here, the experimental beam shutter implemented in the mardtb goniometer stays open for the entire data collection - even during read-out. While this procedure introduces a small systematic error the overall experimental error is likely to be considerably smaller than the systematic errors generated by shutter operations and synchronization of shutter operations with the rotation axis. Therefore the "shutterless" operation is the clearly preferred way of collecting data - even if the classic data collection mode is still available.
Wherever appropiate, differences in the GUI between program mardtb and mar345dtb will be pointed out.
4. Computer Requirements
Program mar345dtb needs about 100 MB physical RAM, mainly for transforming incoming images from the detector. Most of the time, however, the program is not very busy and does not consume too much CPU time. For image display and other visualization purposes, a 24-bit color display is mandatory. The program requires a minimum screen resolution of 1280x1024 pixels. The program makes use of large transformation tables, so the minimum program installation requires a disk space of 200 MB. Further components in the current mar-software distributions like the automar-data processing package may increase the required disk space to 300 MB.
The following specifications are considered as minimum requirements:
Table 6: Computer specifications
| Component | Requirement |
|---|---|
| CPU | Intel or AMD > 1 GHz |
| Memory (RAM) | >= 256 MB |
| Hard disk | >= 8 GB |
| Video card | 24 bit colors at ≥ 1280x1024 pixels @ > 70 Hz |
| Network card | Dedicated ≥ 10 MBit/s with IP-address 192.0.2.2 |
| TV card | Optional for displaying crystal on PC. Only supported on Linux. Recommended model: Hauupauge WinTV Express |
| Peripherals (optional) | DVD or CD-writer (ATAPI or SCSI) |
| Monitor | 19'' or larger, 1280x1024 pixels @ > 70 Hz |
| Required OS components | X-windows, X11-environment, openmotif libraries, libpng12, libjpeg.so.8, libtiff.so.5 v4l-compontents (video for Linux) |
| Additional libs for DECTRIS | libjansson, libzmq, libcurl-gnutls |
Important notes:
- All computer systems MUST be equipped with an additional Ethernet card.
- At installation time computers are expected to be FULLY FUNCTIONAL.
- For the desktop beamline a video frame grabber is strongly suggested. marXperts only supports this feature on PCs running Linux.